
M2の望月です.アメリカのパサデナで2024年8月26日~30日に開催された The 33rd IEEE International Conference on Robot and Human Interactive Communication (IEEE RO-MAN 2024) に参加し,口頭発表を行いました.
基本情報
IEEE RO-MANは,ロボットと人間のコミュニケーションに関する国際会議です.
今年は,アメリカのパサデナにあるPasadena Convention Centerで開催されました.


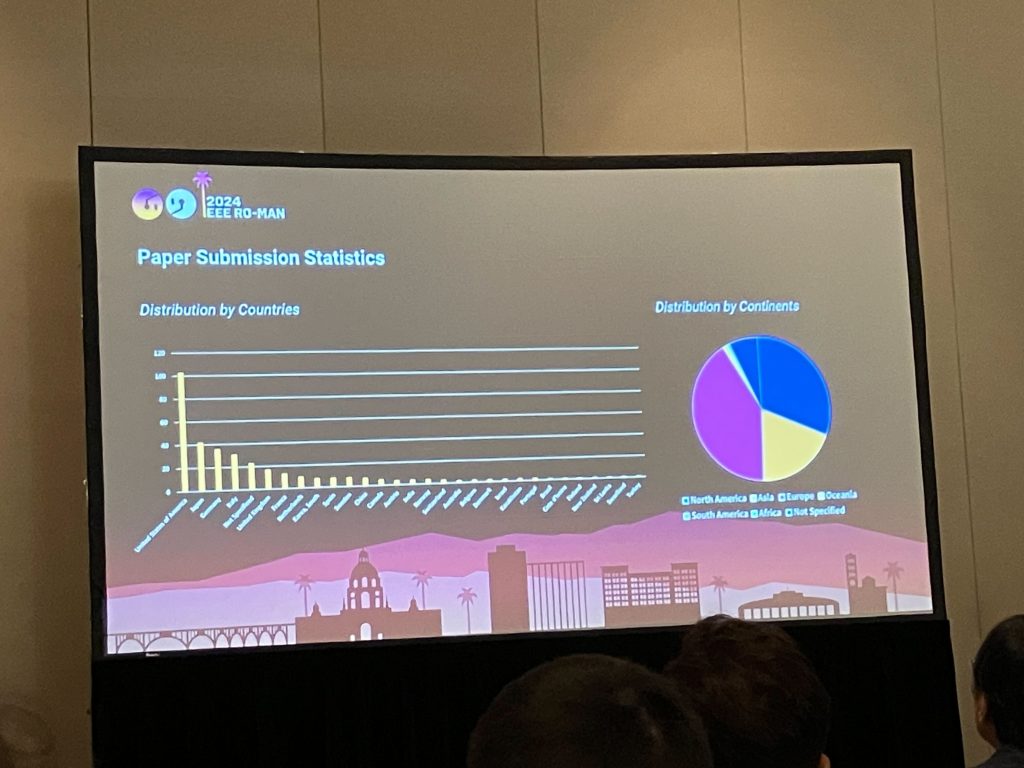
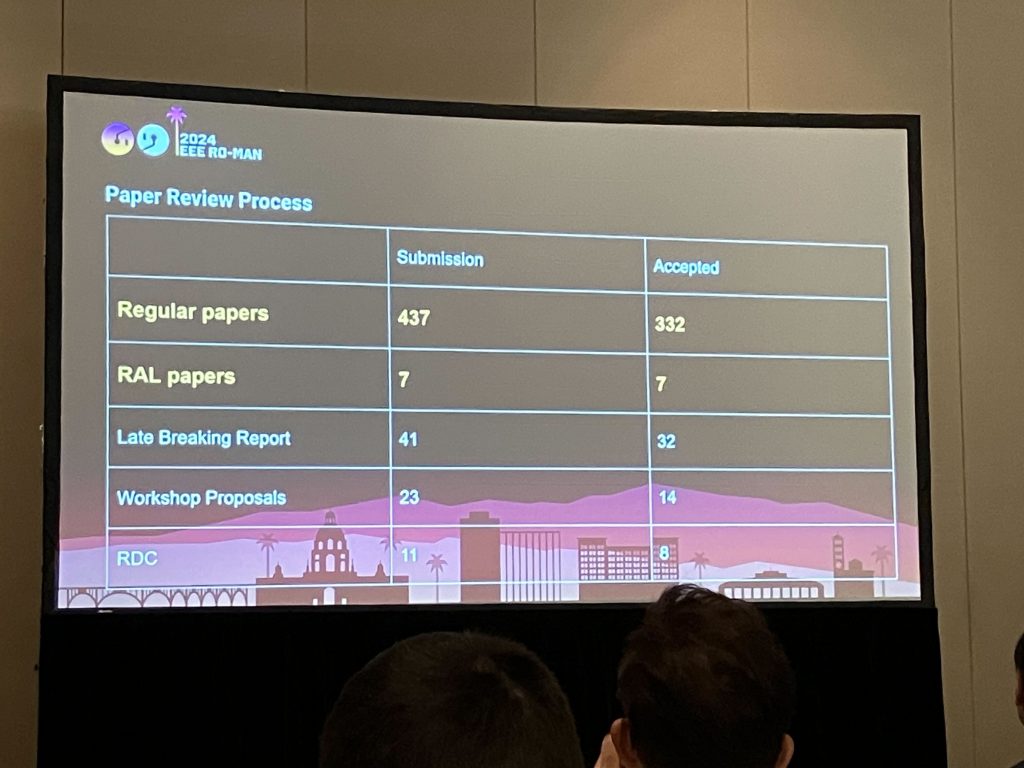
参加登録数は547人で,北アメリカ,アジア,ヨーロッパと世界各地から多くの参加者が集まりました.Regular Paperの投稿件数は437件,採択数は332件で,過去10年で2位の投稿数だったようです.

Plenary Talks・Keynotes
2件のPlenary Talk,3件のKeynoteがありました.
Plenary Talks
- HRI in the era of Robot Foundation Models
Vincent Vanhoucke (Senior Director, Google DeepMind)
HRIにおける基盤モデルの適用に関して,具体的な取り組みや課題についての紹介がありました.SayCanの著者の一人でもあり,HRIの最先端の研究についてデモ映像を交えながら説明されており,大変興味深かったです.HRIの現状の課題は事前に定義されたインタラクションしか実行できないところにあるとして,フィードバックに基づいてnon-expertに振る舞いを学習していく強化学習のアプローチが鍵になるとのことでした. - Human-Centered Design for the Practical Deployment of Socially Assistive Robots for Healthcare
Ayanna Howard (Dean of the College of Engineering, Ohio State University)
人間とコミュニケーションを取るソーシャルロボットの中でも,特にヘルスケアにおけるソーシャルロボットに関する研究が紹介されました.患者などのインタラクション相手の特性にパーソナライズすることが重要として,相手からのフィードバックや相手の属性に応じてロボットの振る舞いを変化させていくアプローチは,ロボット工学に馴染みの無い自分にとっては新鮮で大変興味深かったです.
Keynotes
- Socially assistive robots: how we can do better
Shelly Levy-Tzedek (Associate Professor, Ben-Gurion University)
ヘルスケアにおけるソーシャルロボットに関する研究として,脳卒中患者のリハビリでの活用に関する取り組みが紹介されました.トレーニングの指示やフィードバックを行うロボットを導入したグループでは,コンピュータを使用したリハビリや,通常のリハビリを行ったグループよりも有意に運動機能が向上したという研究で,身体性のあるロボットの強みやポテンシャルがよく分かりました. - Keynote Speech by Maya Cakmak
Maya Cakmak (Associate Professor, University of Washington)
望月はTech Tour(下記)に参加していたため聴講できなかったのですが,各家庭における高齢者の支援ロボットに関する取り組みについて紹介されたとのことです. - On designing robots to be invisible-in-use
Leila Takayama (VP of Design and Human-Robot Interaction, Robust.AI)
HRIにおいて,ロボット自身をinvisible-in-useにする(人間に良く馴染んだ存在として,「使用している」感覚を取り除く)ために重要な点について,具体的な事例が紹介されました.荷物の運搬ロボットや掃除ロボットなど,人間が使用するロボットのデザインに関する概念的な話が中心で,対話ロボットを主に扱っている自分にとっては新鮮でした.
自身の発表
望月は,本会議3日目の「Multimodal Interaction and Conversational Skills I」のセッションにて,人間とロボットとのインタラクションにおいて生じた問題(異常)を検出することを目的としたデータセット作成及び異常検出モデルの構築について発表しました.発表では,自身の先行研究にて実施した実証実験で収集した映像からデータセットを作成する具体的なプロセスや,構築した異常検出モデルのアーキテクチャ,および検出精度について報告しました.質疑応答では,モデルが良く検出できた(あるいはできなかった)異常の具体例や,テキスト情報の利用について質問を受けました.
Learning Anomaly Detection Models for Human-Robot Interaction Proceedings Article
In: Proceedings of the 33rd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN) , pp. 1720–1725, 2024.
気になった発表
望月が聴講した発表の中で,特に興味深かった発表を2件紹介します.
- A Humanoid Robot Dialogue System Architecture Targeting Patient Interview Tasks
SHEN, Yifan et al.
患者の面談タスクにおける対話システムでは,患者の発話に対する相槌を適切に行うことが重要であるが,一般的なターンテイキングによる応答生成では,リアルタイムに自然な相槌を行うことは難しいという課題に着目して,患者の発話への応答を生成するメインループの他に,ユーザのエンゲージメントに着目して適宜割り込みながら相槌を行う内部的なループを導入する新たなアーキテクチャを提案した研究です.提案手法を導入した面談ロボットは,ロボットへの印象や応答タイミングの適切さというアンケート項目で,高い評価を達成していました. - Enhancing LLM-Based Human-Robot Interaction with Nuances for Diversity Awareness
Lucrezia Grassi, Carmine Tommaso Recchiuto, Antonio Sgorbissa.
社会支援ロボットによる対話においては,対話相手の属性に応じて対話内容を変化させることができる多様性が重要であるという目的意識のもと,様々な対話のニュアンス(相手の国籍や精神状態,現在の時刻や季節,場所,発話のトーンなど)をプロンプトに与えることで相手の属性に応じた発話が可能なLLMベースの対話ロボットを実現した研究です.ケーススタディにより,本システムは様々にニュアンスを変化させた多様性のある対話が可能で,ユーザから高い評価を得たことが報告されていました.なお,この論文は,Best Paper Awardを受賞していました.
Tech Tour
本会議開催中,RO-MAN主催のTech Tourが複数行われており,望月は,カリフォルニア工科大学を見学するツアーに参加しました.施設内を回りながら,開発しているロボットのデモを見学することができ,貴重な経験となりました.


参加してみて
望月にとって海外での国際会議参加は2回目でしたが,現地で参加者と議論したり,お互いの研究内容について説明し合ったりと,有意義なコミュニケーションを取ることができました.また,口頭発表では,発表後自分のもとに質問に来てくださった方がいたりと,興味を持って聞いていただけたと思います.
また,対象の分野がHRIと幅広い国際会議であるため,対話研究の他にもロボットのデザインや倫理など様々なジャンルの論文が投稿されており,普段ではあまり触れることが無い分野の研究発表を聞くことができ,自身の見識を広める良い機会になりました.会場では企業によるロボットの展示も行われており,四足歩行のロボットが通路を歩き回る様子は近未来的でした.


パサデナは,治安も良く景観も綺麗で,ただ散歩しているだけでも楽しめる素敵な街でした.日本食をはじめとしてアジア料理のレストランも多く,海外経験の少ない自分でも楽しめました.




来年度のRO-MANは,オランダのアイントホーフェンで開催予定とのことです.